硕士毕设项目-研究内容
1. 研究内容
CAMINO云原生自主管理与意图编排器
2. 参考论文:
3. 主要目标
实现CAMINO控制平面,引入机器学习实现资源预测、调度优化、故障预警。
4. 使用技术栈
- 前端:Vue 3,Axios,ECharts。
- 后端:Node.js,Fastify,Sequelize,MySQL,K8s,Gitlab CE,ConfigSync,Prometheus,Istio,Python。
5. 当前进度
论文已有最终评分,最终成绩B1(17/22),但机器学习部分实际实现由于时间限制未完成,仅有模拟实验数据。
6. 研究结论
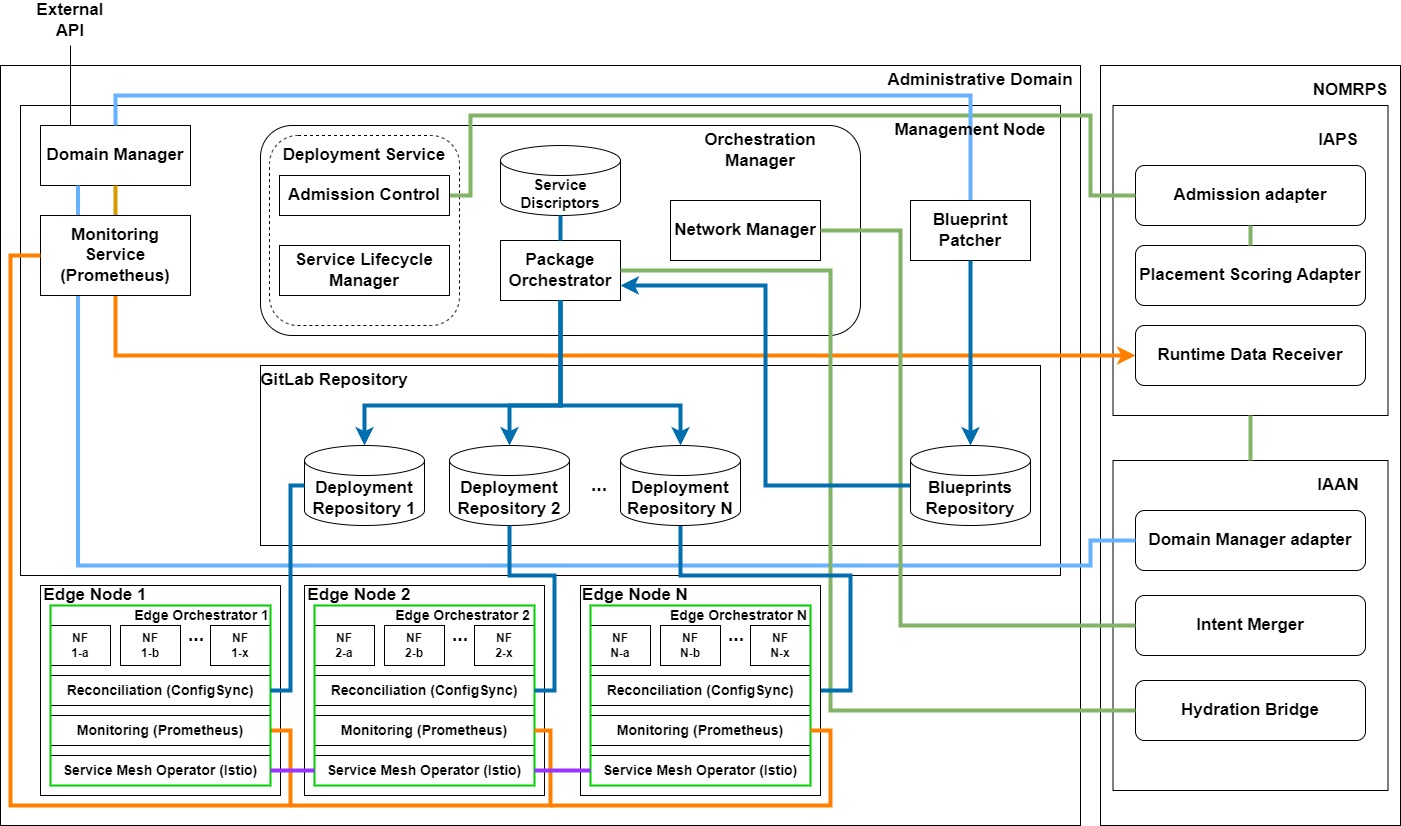
其中IAAN负责意图的分析与拆解,并结合IAPS的预测共同决定服务的放置位置以及连接方式(Inter-edge, Intra-edge, Cross-domain)。
论文对于NOMRPS进行了基础的模拟实验。模拟实验采用了三个Docker Container,并模仿生产环境的部署流程,向NOMRPS提交部署意图。由于IAPS在模拟实验中并未起到实际效果,所以模拟实验更多的是检验IAAN的策略有效性。
实验结果表明,在传统的意图打包式(bundle)部署中,若服务所需资源超过单边缘节点限制,则可能导致所有服务无法成功部署。而NOMRPS可以进行意图分析,并拆分服务到不同的节点并配置连接方式,大幅降低了意图部署的失败率。同时通过将频繁通信的服务放置于同一节点,明显降低了服务间通信延迟。
由于NOMRPS的分布式部署,从而使系统总体CPU使用效率提升,但是作为代价的是内存的平均使用率升高了51.48%。由于服务拆分以及重新编排的存在,服务之间的通信延迟对比基线部署方式平均降低了25%,p90延迟降低了55%。
本研究探明了NOMRPS对于CAMINO的部署成功率和运行效率的提升的有效性,但本次研究仍有改进空间:NOMRPS部分的IAPS仍然缺少训练,如果IAPS获得在线学习的能力,则会使NOMRPS的预测准确率和服务编排更加地有依据和准确。